
工件铣缺口上下料加工
整体示意
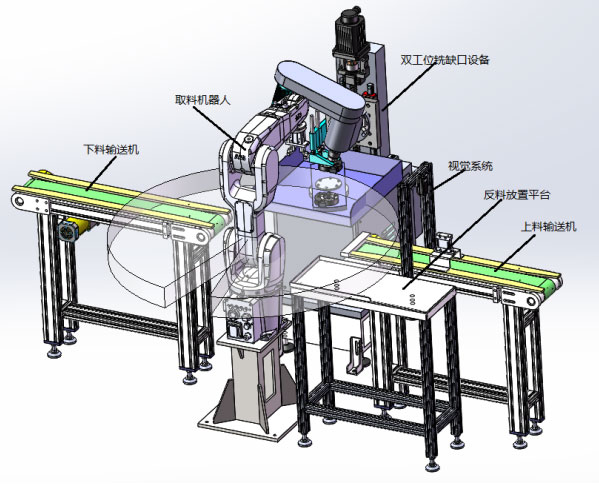
流程介绍
1.未加工的工件从上料输送机输送过来;
2.由视觉系统检测后把数据传输给六轴机器人;
3.等到工件到达待抓取区域时六轴机器人开始工作,把工件抓取放置到双工位旋转平台上的定位机构处;如果上料输送机上的工件放反,机器人把该工件放置到旁边的反料放置平台,重新取下一工件;
4.双工位平台开始旋转,把未加工的工位转到加工工位;
5.对加工位工件进行加固定位,随后铣床开始工作;
6.工件加工完成后,双工位平台旋转180°;
7.六轴机器人从双工位平台取料,放置到下料输送机上,然后机器人从上料工位取下一个工件,重复上面动作。
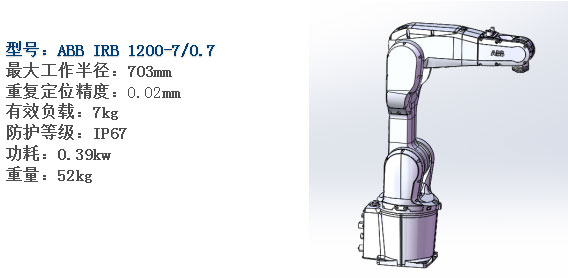
机器人参数介绍
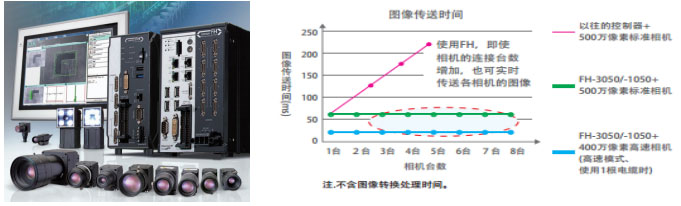
视觉系统介绍
FH系列视觉系统
我们的优势:
1、构建应用程序所需的相机系列齐全。
2、无延迟的图像传送FH-3050/-1050系列配备了强劲的图像传送总线。无需选择连接相机,即可构建将相机规格发挥至极限的应用。
3、有强力控制器支持高速高精度的检查测量。
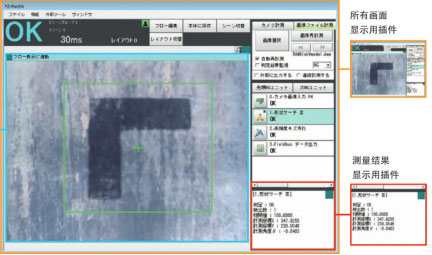
视觉系统应用
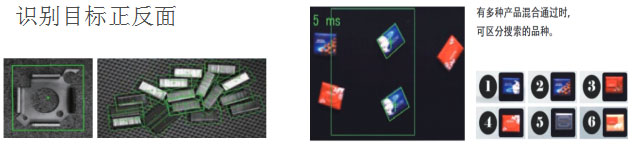
精准的目标定位
通过使用FH视觉系统,我们可以获得更加精准的目标定位与更加快速、智能的识别结果,与以往相比欧姆龙的模板高速搜索与匹配技术得到进一步提升。在此基础上,在对于FA现场至关重要的高强度性上得到大幅升级的形状搜索III诞生了。玻璃的贴合等,需要测量与相机距离不同的工件时可能会导致大小的偏差或虚焦。但通过利用新算法形状搜索III,即使遇到这种情况也可以快速准确地找到位置,并区分不同目标。
控制系统参数介绍
NX1P系列控制系统
1、集高功能运动控制和实现现场IoT的网络于一身的Sysmac入门机型。
2、内置EtherCAT端口,通过高功能运动控制实现装置的高速、高精度化。
3、除控制器及运动设备外,通过IO-Link可实现传感器级的制造现场信息化。
4、实现现场IoT的网络。 除控制器及运动设备外,通过IO-Link可实现传感器级的制造现场信息化。通过IO-Link进行预防维护。
5、自动化软件 Sysmac Studio以NJ/NX系列CPU单元为主的,机器自动化控制器的编程、调试、维护提供一体化开发环境的软件。


电话: 010-56130457
邮箱:blg@blonger.com

公司地址:北京市通州区马驹桥镇 联东U谷西区62号


版权所有:北京龙格自动化系统工程有限公司 欧姆龙核心代理商 copyright © 2009 京ICP备15004164号-1 技术支持:七色互联