
智能卡绕线
智能卡绕线系统应用
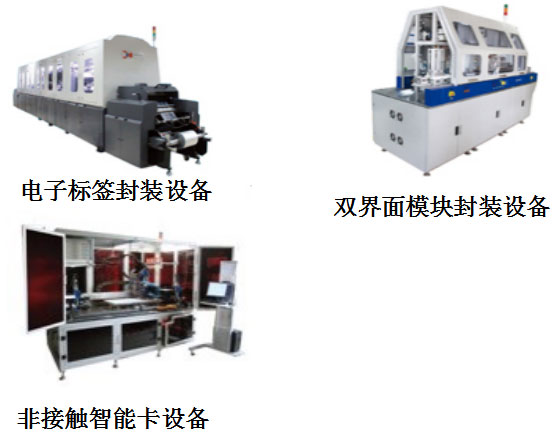
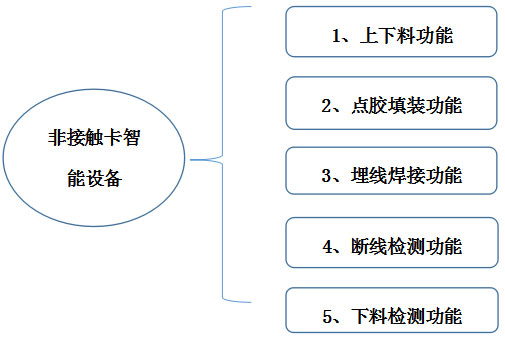
(业务挑战)该绕线系统是应用在非接触面智能卡设备,主要功能有上下料,点胶填装,埋线焊接,断线检测,下料检测等。
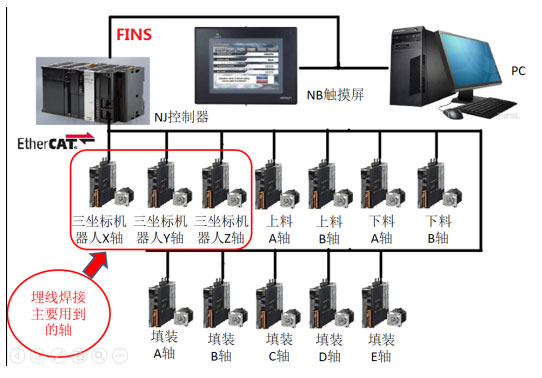
埋线焊接功能:通过天线植入系统,把漆包线植入到基材中并绕制设定的线圈,绕线过程中超声波产生能量会将漆包线植入在基材中。线圈的位置、大小、形状可以通过计算机快速设定。天线植入系统是由X、Y、Z三轴组成的三坐标机器人。
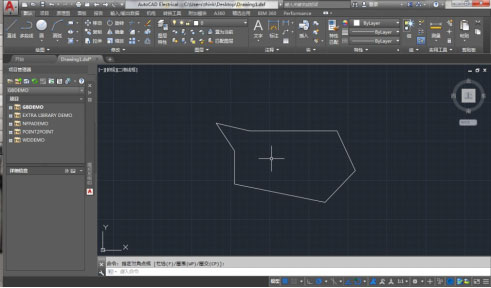
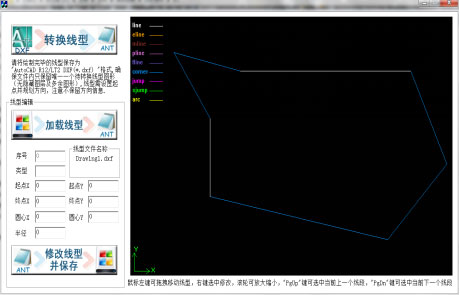
1、开发软件,把CAD数据转换为运动控制命令数据传送到NJ的存储区
线形是保存在CAD文件中,需要先转换为运动控制命令数据再传送至NJ控制器。
因为欧姆龙有 MC_CmdTbl 功能块,可实现连续插补动作。所以需把CAD文件数据导入NJ控制器。
通过数据转换软件把CAD数据导出,提取点位数据以文本的形式保存。用数据下载软件通过FINS命令把点位数据下载至NJ控制器中。
不同工件安装的位置不同,所以会造成点位不同的偏移,在写入MC_CmdTbl的变量中时对每一个坐标点的值进行加减,从而实现坐标的偏移。类似更改机器人的工具坐标系。
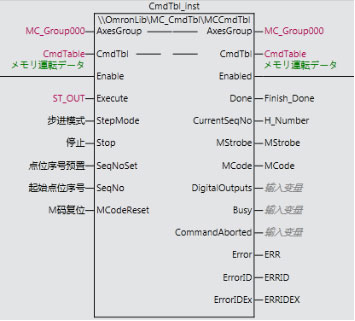
2、MC_CmdTbl 功能块
因为线形的不同,伺服要走不同的连续插补动作,所以用到MC_CmdTbl 功能块来控制伺服。为了控制三坐标机器人连续动作,所以用到了MC_CmdTbl 功能块。
MC_CmdTbl最多支持连续600个插补动作。
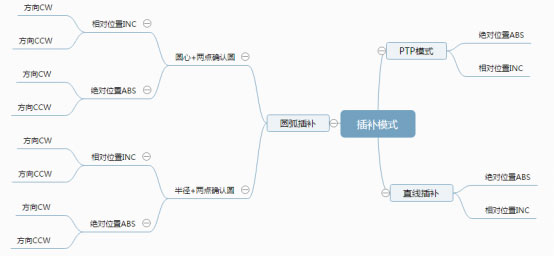
3.保证特殊线形绕线效果
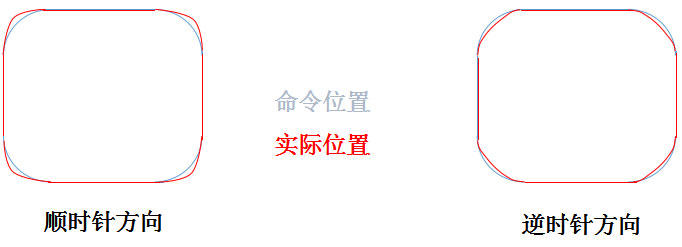
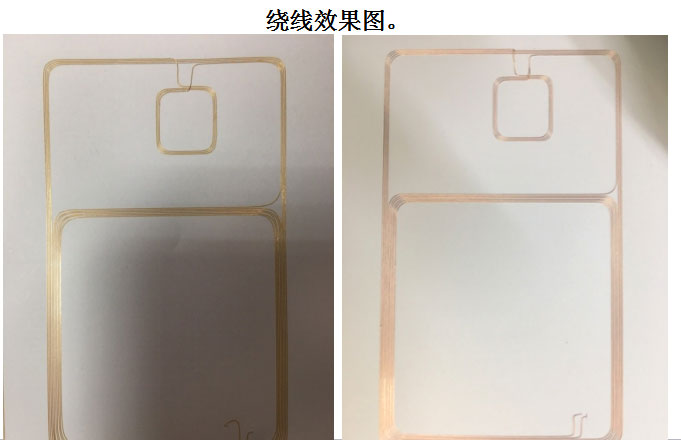
在此案例中,因为运动路径的不确定。所以涉及的插补类型较多。而三轴机器人在顺时针圆弧插补和逆时针圆弧插补交错执行时,为了保证绕线效果,就要在X轴与Y轴的动态跟随误差一致的前提下尽可能降低动态跟随误差。当两轴的动态跟随误差不一致时,顺时针插补与逆时针插补的实际位置将产生很大的变化。
当两轴伺服动态跟随误差不同时效果图
(客户收益)超越客户需求的价值体现
1、速度超出客户要求,达到500mm/s且效果良好
2、全系列欧姆龙产品,降低设备后期的维护难度与开发周期。
3、上位软件人性化的人机交互,降低操作难度。

电话: 010-56130457
邮箱:blg@blonger.com

公司地址:北京市通州区马驹桥镇 联东U谷西区62号


版权所有:北京龙格自动化系统工程有限公司 欧姆龙核心代理商 copyright © 2009 京ICP备15004164号-1 技术支持:七色互联