
智能工厂
系统结构
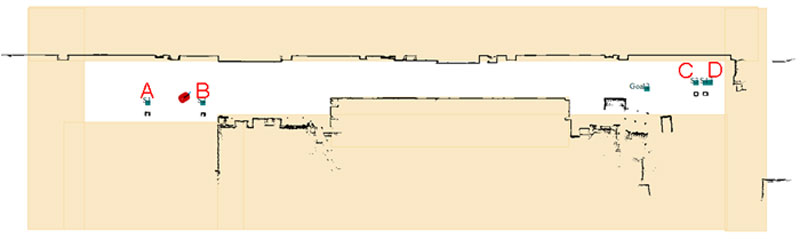
1、系统平面图
现场地图如图所示,目前以ABCD四点模拟生产中的传送带上下料接口,机器人从A点出发,以侧面接驳的形式进入A点接驳,然后向前往B点接驳,接驳后通过长达40m的走廊前往CD两点接驳,然后返回A点形成循环。
2、系统清单

设备描述
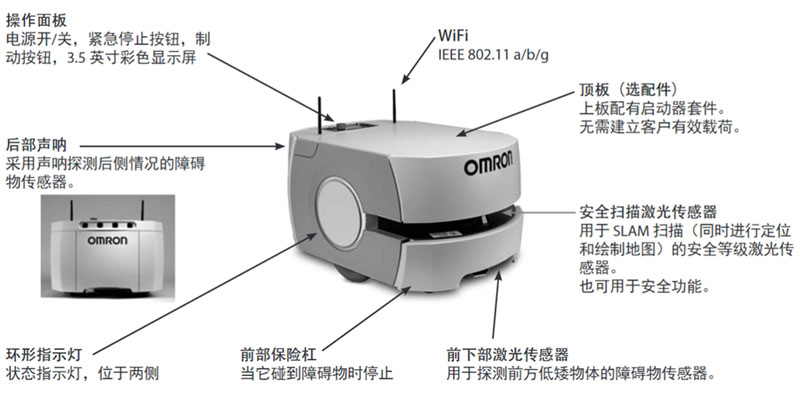
1、Adept机器人
LD系列移动机器人及主要参数

LD系列机器人组件和功能
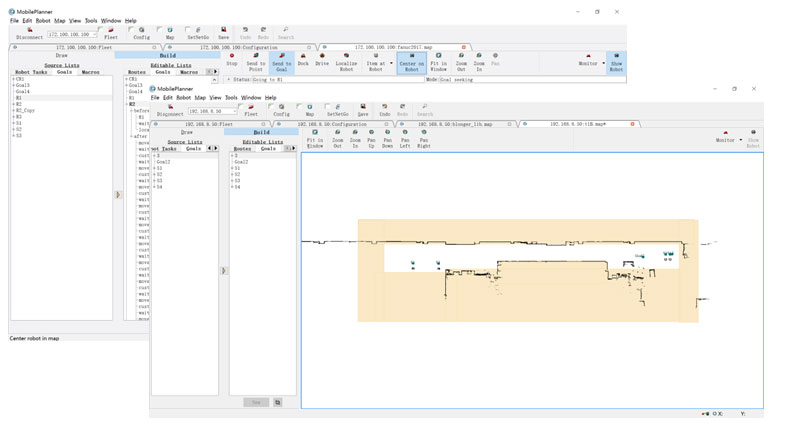
Mobile Planner地图规划软件是运行于PC上的地图绘制与管理软件,它可以对LD机器人上自主绘制的地图进行编辑与管理,同时对机器人进行编程,设置机器人的各种参数,它可以管理一台小车,或同时管理一整个车队。
Mobile Planner地图规划软件
“Enterprise Manager”是一台联网设备,能够协调多台移动机器人,为整个车队提供可追踪、作业分配和交通控制等功能。
Enterprise Manager调度管理器

测试结果及遗留课题
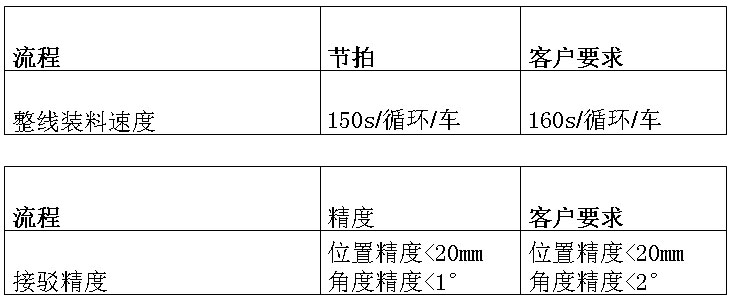
测试结果
1、机器人本体(选型、配置等):
本次测试主要是测试机器人的速度,看是否能够完成客户的节拍要求,在实验中发现,机器人的空载行驶速度已基本达到客户要求,但还需要做满载测试。
2、机械结构(如:夹具、模具、进料盘等):
传送带接驳处存在一定问题,需要考虑机器人的接驳方向,经过测试发现采用侧面接驳的方式速度最快,但侧面接驳有一定的精度要求。
3、软件编程(如:速度优化、精度配置等):
机器人最高移动速度平均为1300mm/s,但在实际情况中需要在到达目标点前后进行减速和加速操作,这会增加时间的消耗,可以通过控制机器人加减速大小来进行优化,但减速过于剧烈会发生类似紧急刹车的情况,机器人再次启动会更加耗时。
4、其他:
此项目需采用两辆小车协同完成,所以后续需要进行多个机器人协同的测试。

电话: 010-56130457
邮箱:blg@blonger.com

公司地址:北京市通州区马驹桥镇 联东U谷西区62号


版权所有:北京龙格自动化系统工程有限公司 欧姆龙核心代理商 copyright © 2009 京ICP备15004164号-1 技术支持:七色互联